Public
Star 历史趋势
数据来源: GitHub API · 生成自 Stargazers.cn
README.md
M³: Dense Matching Meets Multi-View Foundation Models for Monocular Gaussian Splatting SLAM
Kerui Ren, Guanghao Li, Changjian Jiang, Yingxiang Xu, Tao Lu, Linning Xu, Junting Dong, Jiangmiao Pang, Mulin Yu†, Bo Dai†
Overview
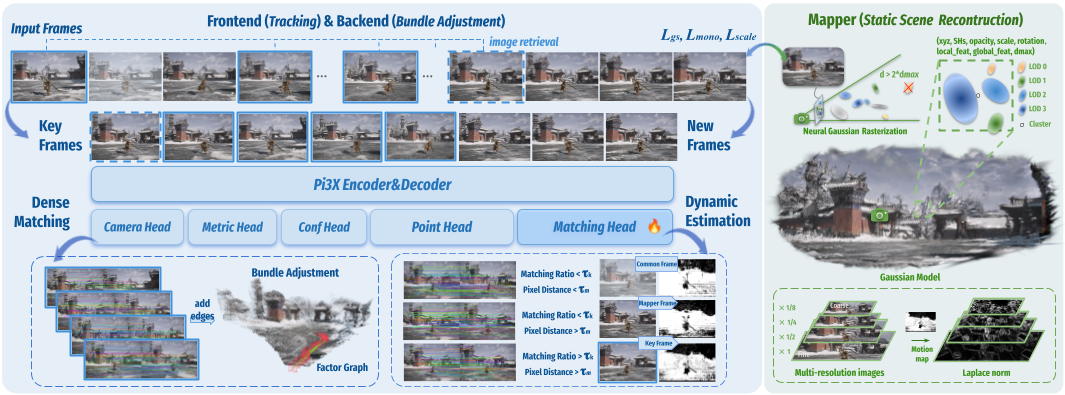 Pipeline of M³. Our framework consists of joint tracking and global optimization for pose estimation and a mapper for scene reconstruction. For monocular sequences, Pi3X processes retrieved historical keyframes and new frames in one inference to facilitate factor graph construction and keyframe selection. Following the Neural Gaussian and LOD architecture of ARTDECO, Gaussians are initialized via Laplacian norm and optimized jointly with camera poses.
Pipeline of M³. Our framework consists of joint tracking and global optimization for pose estimation and a mapper for scene reconstruction. For monocular sequences, Pi3X processes retrieved historical keyframes and new frames in one inference to facilitate factor graph construction and keyframe selection. Following the Neural Gaussian and LOD architecture of ARTDECO, Gaussians are initialized via Laplacian norm and optimized jointly with camera poses.
关于 About
M³: Dense Matching Meets Multi-View Foundation Models for Monocular Gaussian Splatting SLAM
语言 Languages
提交活跃度 Commit Activity
代码提交热力图
过去 52 周的开发活跃度6
Total Commits峰值: 3次/周
LessMore