NeuPAN: Direct Point Robot Navigation with End-to-End Model-based Learning

Table of Contents
- News
- Introduction
- Demonstrations
- Why NeuPAN
- Quick Start
- Examples
- Configuration
- Advanced Usage
- Current Limitations
- FAQ
- License
- Citation
News
- 2025-12-25: Our NeuPAN planner is integrated into the odin-nav-stack project, feel free to try it out!
- 2025-04-24: We provide the python 3.8 compatible NeuPAN version available on py38 branch.
- 2025-03-26: Available on IEEE Transactions on Robotics.
- 2025-03-25: Code released!
- 2025-02-04: Our paper is accepted by T-RO 2025!
Introduction
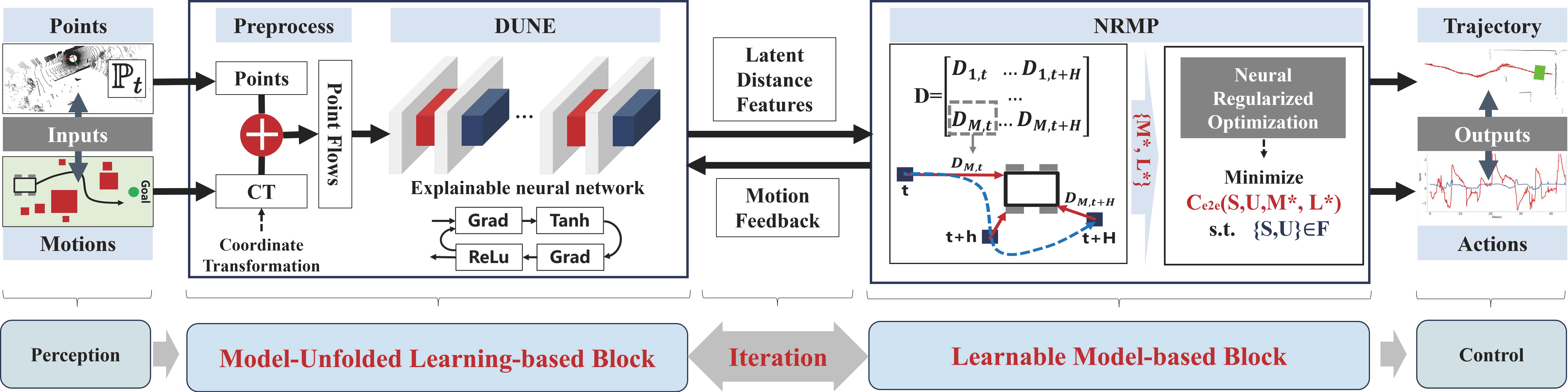
NeuPAN (Neural Proximal Alternating-minimization Network) is an end-to-end, real-time, map-free, and easy-to-deploy MPC based robot motion planner. By integrating learning-based and optimization-based techniques, NeuPAN directly maps obstacle points data to control actions in real-time by solving an end-to-end mathematical model with numerous point-level collision avoidance constraints. This eliminates middle modules design to avoid error propagation and achieves high accuracy, allowing the robot to navigate in cluttered and unknown environments efficiently and safely.
Demonstrations
More real world demonstrations are available on the project page.
https://github.com/user-attachments/assets/7e53b88c-aba9-4eea-8708-9bbf0d0305fc
https://github.com/user-attachments/assets/e37c5775-6e80-4cb5-9320-a04b54792e0e
https://github.com/user-attachments/assets/71eef683-a996-488f-b51b-89e149d0cc6e
https://github.com/user-attachments/assets/fb3f2992-da00-4730-872f-8f3bb8b29163
Why NeuPAN
| Aspect | Traditional Modular Planners (TEB, DWA) | End-to-End Learning-based Planners (RL, IL) | NeuPAN |
|---|---|---|---|
| Architecture | Modular pipeline with object detection, mapping, and planning | End-to-end policy network | End-to-end framework without middle modules, avoiding error propagation |
| Environment Handling | Limited by map representation and object models | Depends on training environments | Directly processes obstacle points, handles cluttered/unstructured environments with arbitrary shaped objects |
| Training Data | N/A (rule-based) | Requires huge amount of real/simulated data | Minimal training data: simply random points within a certain range |
| Training Time | N/A (rule-based) | Hours to days on GPU clusters | Fast training: 1-2 hours on CPU for new robot geometry |
| Retraining | N/A | Often requires retraining for new environments | Train once for robot geometry, apply to various environments without retraining |
| Safety Guarantee | Relies on accurate perception | No formal safety guarantee | Mathematical optimization with collision avoidance constraints for reliable deployment |
| Deployment | Complex integration required | Black-box policy, hard to debug | Easy to deploy and flexible to integrate with global planners (A*, VLN) |
Quick Start
Requirements: Python >= 3.10
# Install NeuPAN
git clone https://github.com/hanruihua/NeuPAN
cd NeuPAN
pip install -e .
# Install IR-SIM for running examples
pip install ir-sim
# Run your first example
cd example
python run_exp.py -e corridor -d diffIR-SIM Examples
You can run examples implemented on IR-SIM in the example folder to see the navigation performance of diff (differential), acker (ackermann) and omni (Omnidirectional) robot powered by NeuPAN in IR-SIM. Scenarios include:
convex_obs(convex obstacles)corridor(corridor)dyna_non_obs(dynamic nonconvex obstacles)dyna_obs(dynamic obstacles)non_obs(nonconvex obstacles)pf(path following)pf_obs(path following with obstacles)polygon_robot(polygon robot)reverse(car reverse parking)- dune training
- LON training
Some demonstrations run by run_exp.py are shown below:
python run_exp.py -e non_obs -d acker | python run_exp.py -e dyna_non_obs -d acker |
|---|---|
python run_exp.py -e polygon_robot -d diff | python run_exp.py -e dyna_obs -d diff -v |
python run_exp.py -e corridor -d acker | python run_exp.py -e corridor -d diff |
python run_exp.py -e dyna_non_obs -d omni | python run_exp.py -e dyna_obs -d omni |
[!NOTE] The pretrained DUNE model provided in these examples are trained under the size of the robot. If you adjust the size of the robot, you must retrain the DUNE model by referring to the DUNE Training example.
[!NOTE] Since the optimization solver cvxpy is not supported on GPU, we recommend using the CPU device to run the NeuPAN algorithm. Thus, the hardware platform with more powerful CPU (e.g. Intel i7) is recommended to achieve higher frequency and better performance. However, you can still use the GPU device to train the DUNE model for acceleration.
Configuration
Since there are quite a lot of parameters setting for the Neupan planner, we provide a YAML file to initialize the parameters in NeuPAN.
| Parameter Name | Type / Default Value | Description |
|---|---|---|
receding | int / 10 | MPC receding steps. |
step_time | float / 0.1 | MPC time step (s). |
ref_speed | float / 4.0 | MPC reference speed (m/s). |
device | str / "cpu" | The device to run the planner. cpu or cuda |
time_print | bool / False | Whether to print the time cost of forward step (s). |
collision_threshold | float / 0.1 | The threshold for collision detection (m). |
robot | dict / dict() | The parameters for the robot. See 'robot' section. |
ipath | dict / dict() | The parameters for the naive initial path. See 'ipath' section. |
pan | dict / dict() | The parameters for the proximal alternating minimization network. See 'pan' section. |
adjust | dict / dict() | The parameters for the adjust weights. See 'adjust' section. |
train | dict / dict() | The parameters for the DUNE training. See 'train' section. |
robot section parameters
| Parameter Name | Type / Default Value | Description |
|---|---|---|
kinematics | str / "diff" | The kinematics of the robot. diff for differential drive, acker for Ackermann drive, omni for omni drive. For diff robot, the output action is linear and angular speed. For acker robot, the output action is linear speed and steering angle. For omni robot, the output action is speed in x and y direction. |
vertices | list[list[float]] / None | The vertices of the robot in the initial state. [[x1, y1], [x2, y2], ...] |
max_speed | list[float] / [inf, inf] | The maximum speed of the robot. For diff: [max_linear_speed, max_angular_speed]. For acker: [max_linear_speed, max_steering_angle]. For omni: [max_linear_speed, max_angular_speed]. Note: Although the omni output action is vx and vy, we still use max_linear_speed and max_angular_speed to make the motion more stable |
max_acce | list[float] / [inf, inf] | The maximum acceleration of the robot. For diff: [max_linear_acceleration, max_angular_acceleration]. For acker: [max_linear_acceleration, max_steering_acceleration]. For omni: [max_linear_acceleration, max_angular_acceleration]. |
wheelbase | float / None | The wheelbase of the robot. Generally set for the ackermann robots. |
length | float / None | The length of the robot. If the vertices is not given, this parameter is required for rectangle robot simply |
width | float / None | The width of the robot. If the vertices is not given, this parameter is required for rectangle robot simply |
name | str / kinematics + "_robot" + '_default' | The name of the robot. Used for saving the DUNEmodel. |
ipath section parameters
| Parameter Name | Type / Default Value | Description |
|---|---|---|
waypoints | list[list[float]] / None | The waypoints of the path. [[x1, y1, theta1], [x2, y2, theta2], ...] |
loop | bool / False | When robots arrive at the last waypoint, whether the path will be reset to the beginning. |
curve_style | str / line | The style of the curve. dubins for Dubins' path, reeds for Reeds-Shepp's path. line for straight line. |
min_radius | float / default_turn_radius of the robot | The minimum radius of the curve. |
interval | float / ref_speed * step_time | The interval of the points in the path, it is recommended to be set less than or equal to the ref_speed * step_time. |
arrive_threshold | float / 0.1 | The threshold to judge whether the robot arrives at the target. |
close_threshold | float / 0.1 | The threshold to judge the closest point on the path to the robot. |
ind_range | int / 10 | The index range of the waypoints, used for finding the next reference point on the path. |
arrive_index_threshold | int / 1 | The threshold of the index to judge whether the robot arrives at the target. |
pan section parameters
| Parameter Name | Type / Default Value | Description |
|---|---|---|
iter_num | int / 2 | The number of iterations. Large number could guarantee convergence but with high computational cost. |
dune_max_num | int / 100 | The maximum number of obstacle points considered in the DUNE layer. |
nrmp_max_num | int / 10 | The maximum number of obstacle points considered in the NRMP layer. |
dune_checkpoint | str / None | The checkpoint model path of the DUNE model. |
iter_threshold | float / 0.1 | The threshold to judge whether the iteration converges. |
adjust section parameters
You may adjust the parameters in the adjust section to get better performance for your specific workspace.
| Parameter Name | Type / Default Value | Description |
|---|---|---|
q_s | float or list[float] / 1.0 | The weight for the state cost. Can be a scalar value (e.g., 1.0) or a 3-element list for x, y, theta dimensions (e.g., [1.0, 1.0, 0.5]). Large value encourages the robot to follow the initial path closely. Using a vector allows different weights for position (x, y) and orientation (theta). |
p_u | float / 1.0 | The weight for the speed cost. Large value encourages the robot to follow the reference speed. |
eta | float / 10.0 | Slack gain for L1 regularization. |
d_max | float / 1.0 | The maximum safety distance. |
d_min | float / 0.1 | The minimum safety distance. |
ro_obs | float / 400 | The penalty parameters for collision avoidance. Smaller value may require more iterations to converge. |
bk | float / 0.1 | The associated proximal coefficient for convergence. |
solver | str / "ECOS" | The optimization solver method for the NRMP layer. See cvxpylayers and cvxpy for more details. |
[!TIP] Using Vector
q_sfor Different Weights on x, y, and theta:You can adjust the
q_sparameter at runtime usingupdate_adjust_parameters():# Scalar q_s (same weight for x, y, theta) neupan_planner.update_adjust_parameters(q_s=0.5, p_u=1.0, eta=10.0, d_max=1.0, d_min=0.1) # Vector q_s (different weights for x, y, theta) neupan_planner.update_adjust_parameters(q_s=[0.5, 0.5, 0.1], p_u=1.0, eta=10.0, d_max=1.0, d_min=0.1) # This example uses lower weight (0.1) for theta, allowing more orientation flexibility
[!NOTE]
q_sDimension Alignment:The
q_stype (scalar or vector) must be consistent between initialization and runtime updates. Ifq_sis initialized as a scalar in the YAML config, you can only update it with a scalar value. If initialized as a 3-element vector, you can only update it with a 3-element vector. To switch between scalar and vectorq_s, you need to re-initialize the planner with the desired type in the YAML config.
train section parameters
| Parameter Name | Type / Default Value | Description |
|---|---|---|
direct_train | bool / True | Whether to directly train the DUNE model without asking for confirmation. |
model_name | str / robot_name | The name of the model for file saving. |
data_size | int / 100000 | The size of the generated training data. |
data_range | list[float] / [-25, -25, 25, 25] | The [x_min, y_min, x_max, y_max] range of the generated training data (meter). If your robot will consider the obstacle points outside this range, you must set a larger value. |
batch_size | int / 256 | The batch size for training. |
epoch | int / 5000 | The number of epochs for training. |
valid_freq | int / 100 | The frequency of the validation. |
save_freq | int / 500 | The frequency of saving the model. |
lr | float / 5e-5 | The learning rate for training. |
lr_decay | float / 0.5 | The decay rate for the learning rate. |
decay_freq | int / 1500 | The frequency of the learning rate decay. |
save_loss | bool / False | Whether to save the loss to file. |
Advanced Usage
DUNE Model Training
To train a DUNE model for your own robot with a specific convex geometry, you can refer to the example/dune_train folder. Specifically, the convex geometry is defined in the robot section by the vertices (or length and width for rectangle) when the robot is in the initial state (coordinate origin). The training parameters can be adjusted in the train section.
[!NOTE] The DUNE model only needs to be trained once for a new robot geometry. This trained model can be used in various environments without retraining.
ROS Integration
We provide a ROS wrapper for NeuPAN. You can refer to the neupan_ros repo to see the details. The Gazebo demonstrations are shown below:
https://github.com/user-attachments/assets/1d5eb028-0d22-4741-8899-40a3ea7caab4
Real World Deployment
-
You can easily deploy the NeuPAN algorithm on a real robot platform using neupan_ros. Currently, NeuPAN supports the kinematics of differential drive robots, Ackermann robots and omni-directional robots (see the
robotsection in the YAML file). For robots with other kinematics, you can modify the constraints in the NRMP layer to suit your needs. -
The DUNE model trained in simulation can be directly applied in the real world without retraining.
-
NeuPAN solves the mathematical optimization problem in real time. Thus, its performance is influenced by three main factors: 1) the computing power of the CPU-based hardware platform; 2) the adjustment of the parameters in the
adjustsection; and 3) the naive initial path provided by the user. -
We recommend using a hardware platform with a powerful CPU to enable NeuPAN to run at a control frequency higher than 10 Hz. You can run the provided examples to observe the forward time cost of NeuPAN. To reduce this cost, adjust parameters such as
receding,nrmp_max_num,dune_max_num,iter_num, anditer_thresholdto make NeuPAN run faster. In our experience, an Intel i7 CPU is capable of running NeuPAN at a control frequency higher than 15 Hz. -
The
adjustparameters are used to tune the weights of the state cost, speed cost, and collision avoidance cost. These parameters influence NeuPAN's behavior, making it either more aggressive or more conservative. You can adjust or train these parameters to achieve better performance for your specific workspace. Additionally, these parameters can be fine-tuned in real time for different scenarios. -
The naive initial path can be generated from the provided waypoints or derived from a global planner like A* without accounting for obstacles. This path serves as a simple, rough initial guess for NeuPAN. We offer functionality to generate the initial path from given waypoints as either:
- direct lines for differential drive robots,
- Dubins' paths for forward Ackermann vehicles, or
- Reeds-Shepp paths for forward and backward Ackermann vehicles.
Current Limitations
- CPU-bound optimization: The NRMP layer uses cvxpy which does not support GPU acceleration, so inference speed depends on CPU performance.
- Supported kinematics: Currently limited to differential drive, Ackermann, and omnidirectional robots. Other kinematics require modifying the NRMP constraints.
- Convex robot geometry: The DUNE model assumes convex robot shapes. Non-convex robots need to be approximated by convex hulls.
- Parameter tuning: Performance in specific environments may require tuning the
adjustparameters for optimal results.
FAQ
Can I use 3D lidar or other sensors such as camera to run this algorithm?
Yes. NeuPAN algorithm is designed to read the 2D points as obstacles to avoid. You can use any sensors to get these points and feed them to NeuPAN. For 3D lidar, you can convert the 3D points to 2D space by projecting them onto the ground plane (e.g., pointcloud_to_laserscan); For camera, you can extract the 2D points from the camera image.
How to run NeuPAN on my own robot with a specific kinematics?
Currently, NeuPAN only supports the kinematics of differential drive robots (diff), Ackermann robots (acker) and omni-directional robots (omni). If you want to use other kinematics, you can modify the kinematic constraints in the NRMP layer to suit your needs. We also welcome contributions to support more kinematics by PR or issues. You can test the performance in the ir-sim environments.
When should I retrain the DUNE model?
You only need to retrain the DUNE model when you change the robot size or shape. Except that, changing the sensors or the scenarios will not influence the performance of the DUNE model.
What is the most important parameter to train DUNE?
Before training the DUNE model, you should confirm the robot geometry (vertices or length and width for rectangle) in the robot section is correct. Additionally, data_range in train section is also important, which is decided by the maximum range of the obstacle points you want to consider.
How can I integrate NeuPAN with other global planners such as A*?
You can update the initial path from other global planners in real time by the function set_initial_path. For neupan_ros, you can use the topic /initial_path and set the refresh_initial_path to be True to read the initial path from other global planners.
If there are any technical issues, please feel free to open an issue or contact me (hanrh@connect.hku.hk). Contributions to make this project better are also welcome.
License
This project is licensed under the GNU General Public License v3.0.
Citation
If you find this code or paper is helpful, please kindly star :star: this repository and cite our paper by the following BibTeX entry:
@ARTICLE{10938329,
author={Han, Ruihua and Wang, Shuai and Wang, Shuaijun and Zhang, Zeqing and Chen, Jianjun and Lin, Shijie and Li, Chengyang and Xu, Chengzhong and Eldar, Yonina C. and Hao, Qi and Pan, Jia},
journal={IEEE Transactions on Robotics},
title={NeuPAN: Direct Point Robot Navigation With End-to-End Model-Based Learning},
year={2025},
volume={41},
number={},
pages={2804-2824},
doi={10.1109/TRO.2025.3554252}}For using IR-SIM platform, please consider citing the following paper:
@article{han2026ir,
title={IR-SIM: A Lightweight Skill-Native Simulator for Navigation, Learning, and Benchmarking},
author={Han, Ruihua and Wang, Shuai and Li, Chengyang and Gao, Rui and Wang, Xinyi and Liu, Zhe and Li, Guoliang and Lu, Yupu and Hao, Qi and Pan, Jia and Zhao, Hengshuang},
journal={arXiv preprint arXiv:2606.08729},
year={2026}
}